 Autonomous Tissue Retraction with Force Feedback
Autonomous Tissue Retraction with Force Feedback
- Worked with Dr. Alaa Eldin Abdelaal, under the supervision of Prof. Allison Okamura.
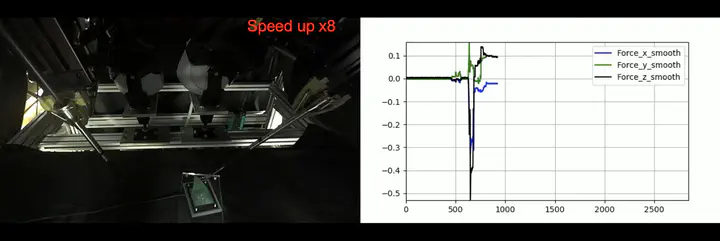
- Force-Aware Autonomous Robotic Surgery: Assisted in the data collection, model training, and model design in robot imitation learning using force and vision data for robotic automatic surgery. The task completion rate of autonomous tissue retraction increased 50% with haptic sensing.
- dVRK System: Conducted experiments using the da-Vinci Research Kit.
Jiaying Fang
Electrical Engineering Master Student
As a Master student, I am interested in Surgical Robot, Robot Learning, and the intersection of Computer Vision and Robotics.