Automatic Path Following, Loading, and Unloading Mobile Cart
Jun 1, 2023
·
1 min read
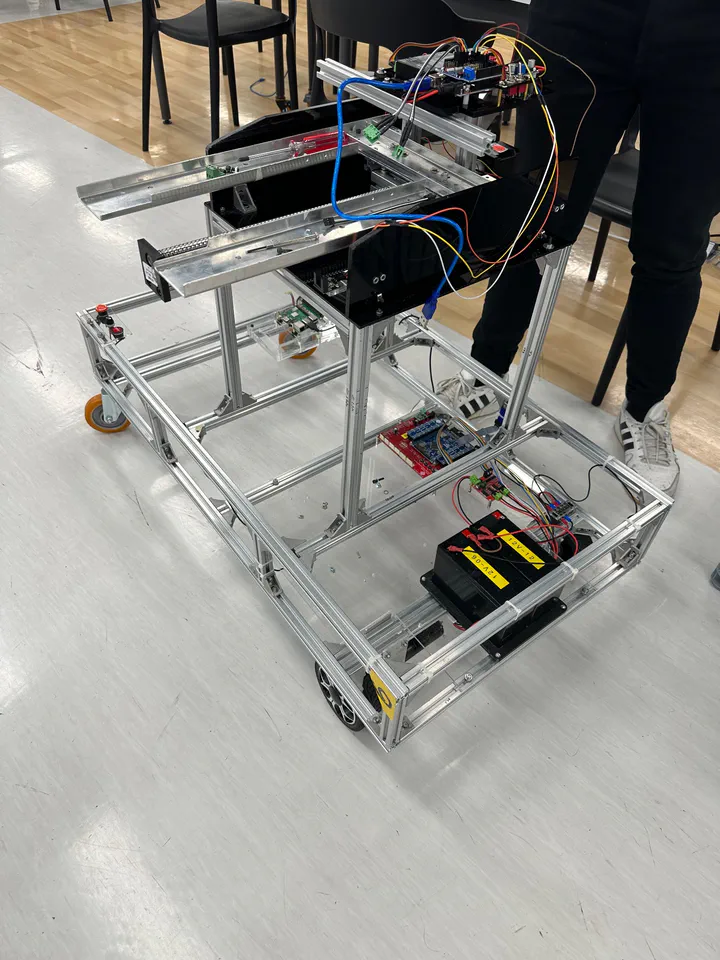
Worked with students from Mechanical Engineering Department together at HK PolyU to build this group project. We built from scratch a mobile cart that can do automatic path following, loading an unloading.