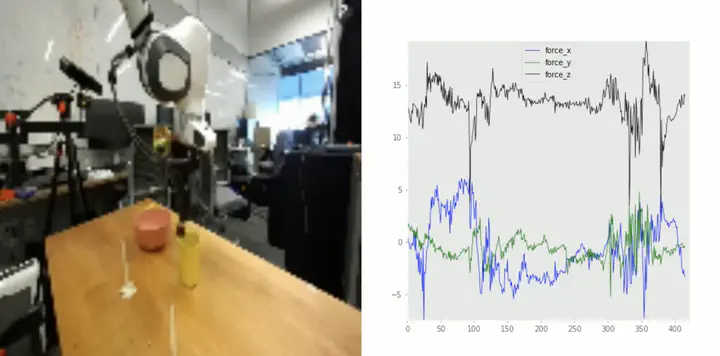
 One sequence from DROID dataset
One sequence from DROID dataset
- Worked at IPRL Lab, under the supervision of Prof. Jeannette Bohg.
- Explored joint torque data in a large robotics dataset - DROID dataset, converted joint torque data to external force data.
- Trained diffusion policy with vision + converted force observations on DROID dataset.
- Summarized the lessons learned on collecting large robot dataset with haptic feedback.
Jiaying Fang
Electrical Engineering Master Student
As a Master student, I am interested in Surgical Robot, Robot Learning, and the intersection of Computer Vision and Robotics.