 Report
Report
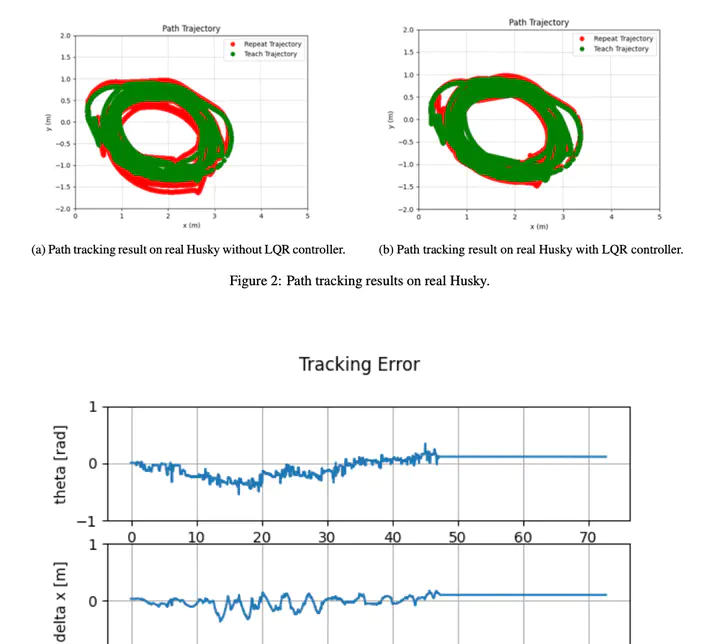
- Designed a finite-horizon LQR control of UGV. Various experiments have been conducted to ensure the robustness of the LQR controller.
- The state of UGV is represented as an element of direct Euclidean isometries, SE(2).
- ROS was used during implementation.
Jiaying Fang
Electrical Engineering Master Student
My research interests include computer vision, deep learning, robotics perception, and autonomous vehicle.