Integration of monocular visual odometry and multi-object tracking
Oct 1, 2021
·
1 min read
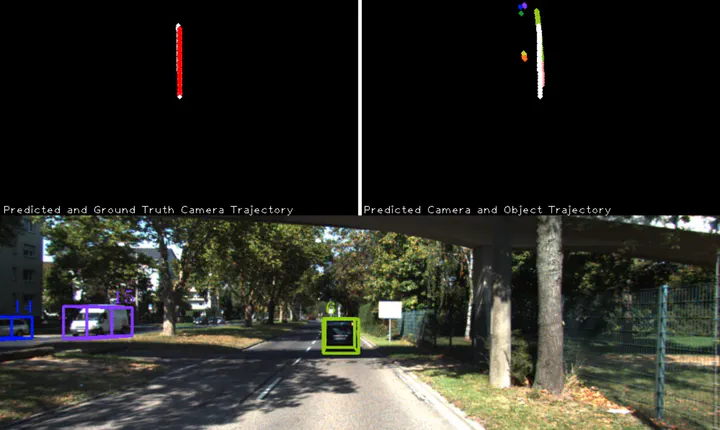
A deep learning-based integration of visual odometry and multi-object tracking. Deep optical-flow estimation and 3D object detection were deployed.
A deep learning-based integration of visual odometry and multi-object tracking. Deep optical-flow estimation and 3D object detection were deployed.