 Result
Result
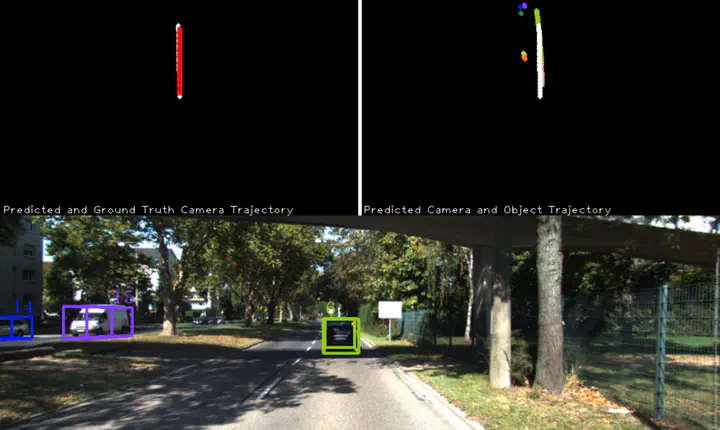
For Visual Odometry, Deep Dense optical flow method together with Geometry constraints (Epipolar Geometry) are used for localization. Because of the property of a monocular VO, scale recovery is also a problem to be solved. I used ground-based scale estimation method, with triangulation, to deal with it.
For Multi-object Tracking, the pipeline is to compensate the camera motion first, and then perform object tracking. The SE3 pose of the camera estimated from the VO can be used here for camera motion compensation. The tracking module can be Kalman Filter, Optical Flow or Deep Learning based method. I used a simple Kalman Filter, took reference from the AB3DMOT for experiments.
Jiaying Fang
Electrical Engineering Master Student
My research interests include computer vision, deep learning, robotics perception, and autonomous vehicle.