Force-Aware Adaptation: What can we do if the force sensor is unavailable?
 Force-aware Policy Adaptation
Force-aware Policy AdaptationAbstract
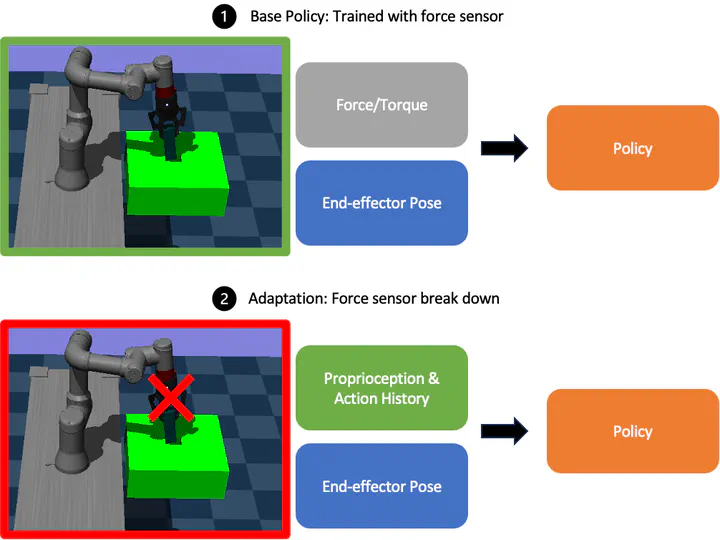
We developed a system that learns and distills the force/torque information during training, then deploys the policy when the force/torque sensor is not available. The distillation module consists of a Teacher-Student architectrue for haptic feedback. The adapted policy can reach a 70% success rate even when the force/torque sensor is unavailable, while the baselines system without the two-stage distillation only achieves 20% succcess rate.