Force-Aware Autonomous Robotic Surgery
Jan 14, 2025· ,,,,,,·
0 min read
,,,,,,·
0 min read
Alaa Eldin Abdelaal
Jiaying Fang
Tim N. Reinhart
Jacob A. Mejia
Tony Z. Zhao
Chelsea Finn
Jeannette Bohg
Allison M. Okamura
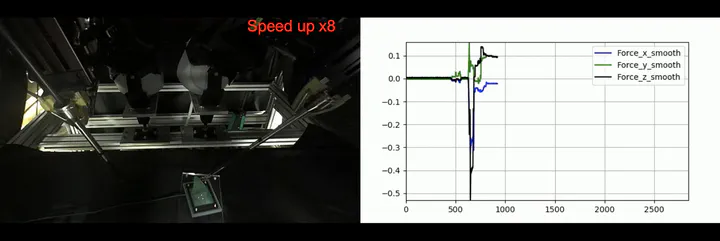 Autonomous Tissue Retraction with Haptic Feedback
Autonomous Tissue Retraction with Haptic FeedbackAbstract
We hypothesize that force-aware autonomous systems will have higher success rate and be more gentle with tissue in surgical robotics tasks requiring physical interaction, compared to force-agnostic ones. This work validates this hypothesis using imitation learning.
Publication
Submitted