LQR Control for UGV in SE(2)
Aug 1, 2022· ·
0 min read
·
0 min read
Jiaying Fang
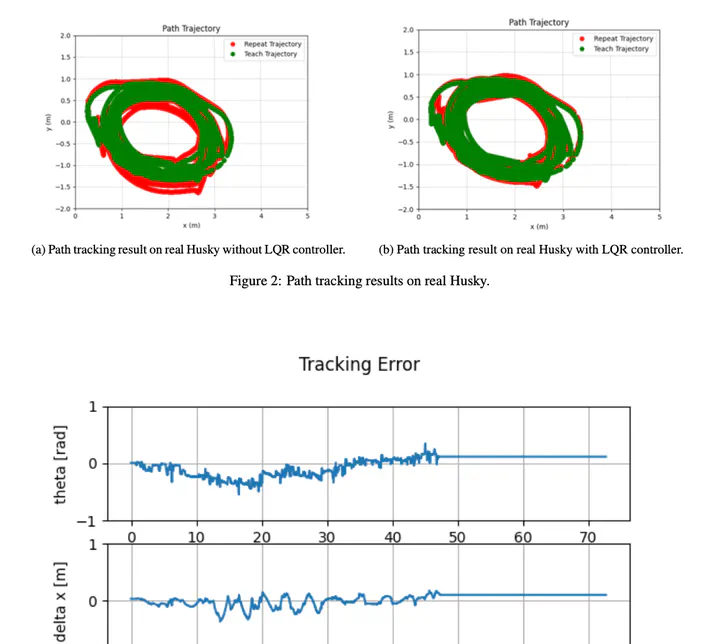 Path Tracking Result on Real Husky Robot
Path Tracking Result on Real Husky RobotAbstract
I designed a finite-horizon LQR control of UGV for path tracking. The state of UGV was represented as an element of direct Euclidean isometries, SE(2).